[1] D. O’Brien et al., “The optimisation of noninvasive ventilation in amyotrophic lateral sclerosis: a systematic review,” Eur. Respir. J., vol. 54, no. 3, p. 1900261, Sep. 2019, doi: 10.1183/13993003.00261-2019.
[2] M. K. Rafiq, A. R. Proctor, C. J. McDermott, and P. J. Shaw, “Respiratory management of motor neurone disease: a review of current practice and new developments,” Pract. Neurol., vol. 12, no. 3, pp. 166–176, Jun. 2012, doi: 10.1136/PRACTNEUROL-2011-000199.
[3] J. Sancho, E. Servera, C. Morelot-Panzini, F. Salachas, T. Similowski, and J. Gonzalez-Bermejo, “Non-invasive ventilation effectiveness and the effect of ventilatory mode on survival in ALS patients,” https://doi.org/10.3109/21678421.2013.855790, vol. 15, no. 1–2, pp. 55–61, 2014, doi: 10.3109/21678421.2013.855790.
[4] B. SC, T. M, W. TL, B. RE, S. PJ, and G. GJ, “Effects of non-invasive ventilation on survival and quality of life in patients with amyotrophic lateral sclerosis: a randomised controlled trial,” Lancet. Neurol., vol. 5, no. 2, pp. 140–147, Feb. 2006, doi: 10.1016/S1474-4422(05)70326-4.
[5] G.-B. J et al., “Prognostic value of efficiently correcting nocturnal desaturations after one month of non-invasive ventilation in amyotrophic lateral sclerosis: a retrospective monocentre observational cohort study,” Amyotroph. Lateral Scler. Frontotemporal Degener., vol. 14, no. 5–6, pp. 373–379, Sep. 2013, doi: 10.3109/21678421.2013.776086.
[6] L. J and E. C, “Amyotrophic lateral sclerosis and assisted ventilation: how patients decide,” Palliat. Support. Care, vol. 8, no. 2, pp. 207–213, Jun. 2010, doi: 10.1017/S1478951510000027.
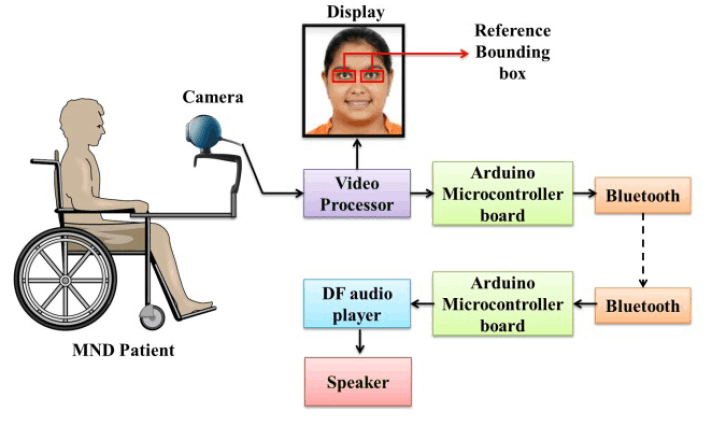
[7] S. R. Rupanagudi et al., “A simplified approach to assist motor neuron disease patients to communicate through video oculography,” Proc. - 2018 Int. Conf. Commun. Inf. Comput. Technol. ICCICT 2018, vol. 2018-January, pp. 1–6, 2018, doi: 10.1109/ICCICT.2018.8325901.
[8] J. Zheng, P. Shi, and H. Yu, “A Virtual Reality Rehabilitation Training System Based on Upper Limb Exoskeleton Robot,” Proc. - 2018 10th Int. Conf. Intell. Human-Machine Syst. Cybern. IHMSC 2018, vol. 1, pp. 220–223, 2018, doi: 10.1109/IHMSC.2018.00058.
[9] PETROTOS, Dimitrios. PETROTOS, Marios-Ermis “MOTORIZED STANDING WHEELCHAIR OF VARIABLE AND ALTERNATING GEOMETRY”; WO2016181173, Mayo 11, 2015.
[10] LoPresti Edmund F. “POWER APPARATUS FOR WHEELCHAIRS”; US20050279551, December 12, 2005.
[11] Y. Zhao, M. Kuruvilla-Dugdale, and M. Song, “Voice Conversion for Persons with Amyotrophic Lateral Sclerosis,” IEEE J. Biomed. Heal. Informatics, vol. 24, no. 10, pp. 2942–2949, 2020, doi: 10.1109/JBHI.2019.2961844.
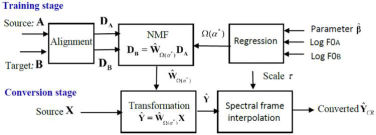
[12] S. R. Rupanagudi et al., “A simplified approach to assist motor neuron disease patients to communicate through video oculography,” Feb. 2018, pp. 1–6, doi: 10.1109/ICCICT.2018.8325901.
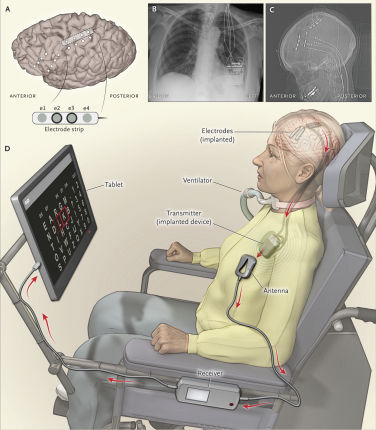
[13] M. J. Vansteensel et al., “Fully Implanted Brain–Computer Interface in a Locked-In Patient with ALS,” N. Engl. J. Med., vol. 375, no. 21, pp. 2060–2066, 2016, doi: 10.1056/nejmoa1608085.
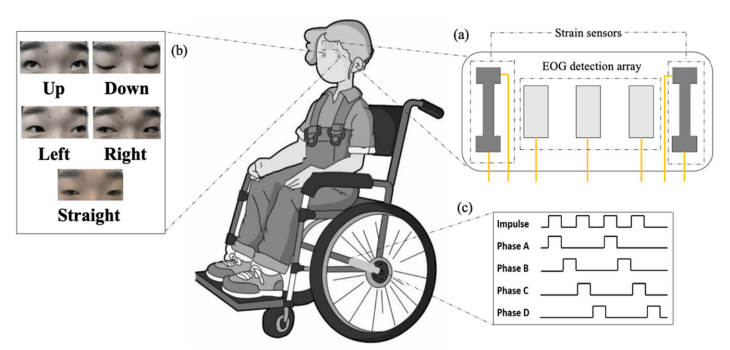
[14] X. Wang, Y. Xiao, F. Deng, Y. Chen, and H. Zhang, “Eye-movement-controlled wheelchair based on flexible hydrogel biosensor and wt-svm,” Biosensors, vol. 11, no. 6, 2021, doi: 10.3390/BIOS11060198.
[15] Q. Huang et al., “An EOG-based human-machine interface for wheelchair control,” IEEE Trans. Biomed. Eng., vol. 65, no. 9, pp. 2023–2032, 2018, doi: 10.1109/TBME.2017.2732479.